大規模点群処理をもっと身近に
株式会社 点群ラボは,2025年4月3日,点群処理の分野で活動してきたメンバーの共同出資により,国立大学法人 電気通信大学の構内に設立されました.点群ラボは, 電気通信大学の増田宏教授の研究室で開発された PCASE (Point Cloud Application System Enabler) を活用して,大規模環境の3次元点群処理システムを開発することを主な目的として設立されました.
測量用レーザースキャナが飛躍的に進歩し、広範囲で高密度、大容量の3次元点群を簡単に取得することができるようになりました.しかし,その一方で,点群データを大量に取得したものの,手作業によるデータ処理に膨大な手間を要し,実際の業務に十分に活用できていない企業も少なくありません.
PCASE には,これまでの研究活動で培われた多くの先進的な機能が組み込まれており,点群ラボはこれを活用することで,顧客のニーズに最適な専用の点群処理システムを短期間で開発することができます.このアプローチにより,顧客の業務における作業量を大幅に削減し,効率的な運用を実現するためのソリューションを提供します.
点群ラボには,日本工業大学の石川貴一朗准教授も Technical Director として参加しています.石川准教授は,日本初の実用的な車載移動計測 (Mobile Mapping System: MMS) や処理ソフトウェアを開発した移動計測分野のパイオニアの一人です.それらの成果は商用化されて,国内で広く活用されています.石川研究室では,建設現場やトンネル計測,森林計測などの様々な領域で,多くの3次元計測システムと点群処理に関する研究開発の実績を持っており,それらを基盤としたソリューションを提供することができます.
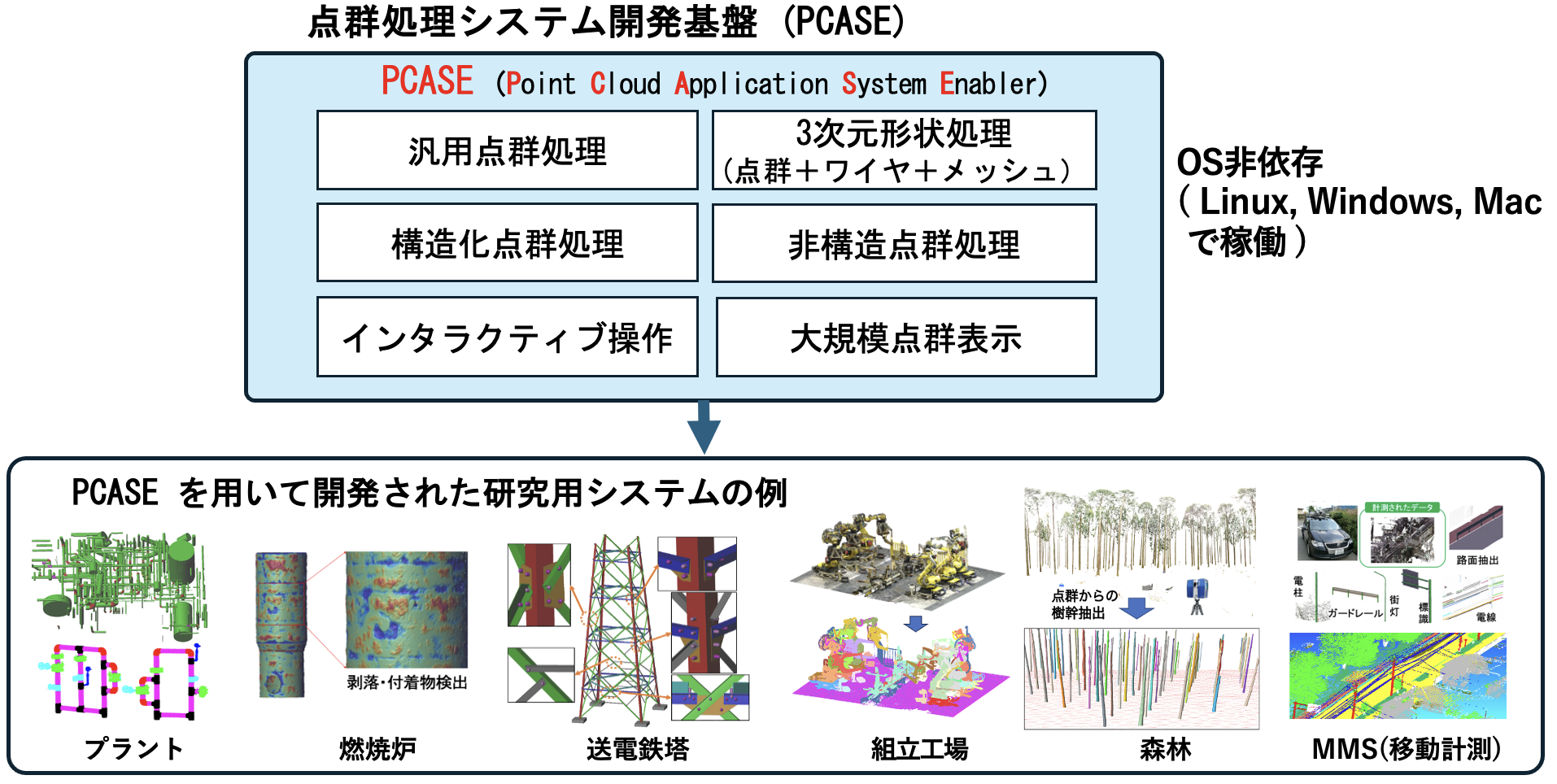
PCASE (Point Cloud Application System Enabler) とは?
点群処理の手法は1980年代後半頃から研究されてきましたが,2000年代になって,高性能な測量用レーザスキャナで一度に数千万点規模の点群が取得できるようになると,メモリ容量や計算時間の制約から,これまでのやり方では大規模点群が扱えないという問題が出てきました.点群を間引けば処理できますが,それでは細部の情報が失われてしまい,せっかくの高精細な点群を活かすことができません.
この問題に対処するために,増田研究室では,2005年から,大規模点群(数億点から百億点を超えるものまで)を,通常の PC で間引くことなく高速に処理し,点群が持つ精緻な情報を忠実に抽出するための手法の研究を開始し,これまでに多くの研究発表を行ってきました.これらの研究用システムを構築するために作成されたソフトウェア部品をまとめたものが PCASE です.この基盤プログラムは,「点群処理基盤」「点群表示基盤」「インタフェース基盤」として体系化されており,20万行を超える C++ プログラムから構成されています.
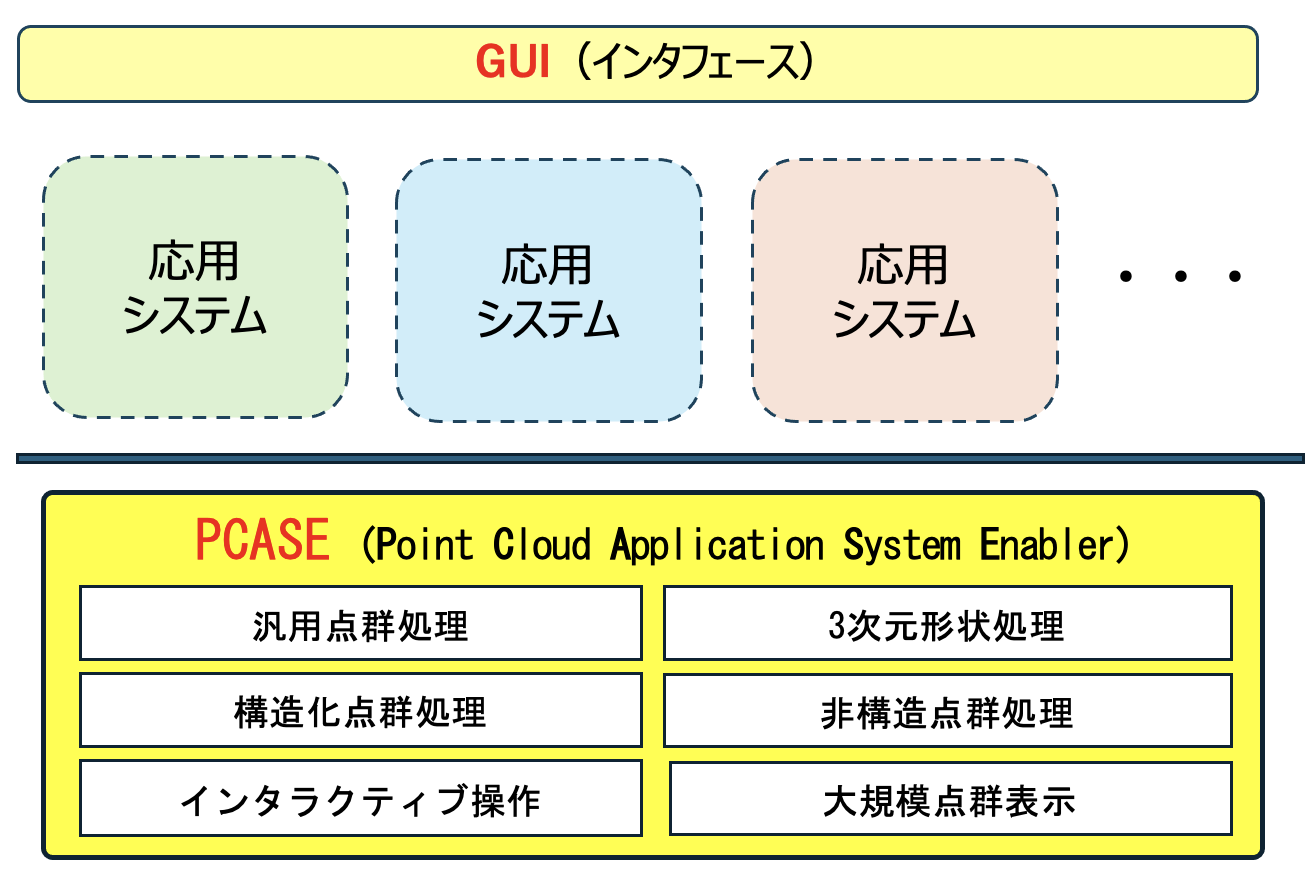
このツールは,下の図で示した学術研究用のシステムだけでなく,民間の様々な課題解決にも極めて有効です.PCASE を用いることで,業務に必要な大規模点群の処理システムを短期間に構築することが可能になります.
PCASE には、これまでの研究活動で培われた多くの先進的な機能が組み込まれており、その機能を用いることにより,顧客のニーズに最適な専用の点群処理システムを短期間で開発することができます。それにより、顧客の業務における作業量を大幅に削減し、効率的な運用を実現するためのソリューションを提供することができます.PCASE は,統一的なデータ構造に基づいた構造になっているため,拡張性が高く,後からでも容易に機能を追加できます.下の図のように,効果を確認しながら,足りない機能を逐次開発して追加することができるので,無駄な投資を削減することができます.また,年度ごとの予算に応じてシステムを成長させていくことも可能です.
点群ラボが提供するソリューションについて
点群ラボでは,3次元計測や点群処理に関する先進的なソリューションを提供することができます.測量用のレーザスキャナで取得した大規模点群を活用した課題に関する相談を希望する方は,問い合わせページより,点群ラボにご連絡ください。対面またはオンラインでのミーティングの場を設定させていただきます.
既存の点群処理システムでは解決が難しい課題の場合でも,まずはご相談ください.現在レーザスキャナを保有しない方で新規の購入を検討している場合でも,代表的な測量用レーザスキャナの精度評価データを保有していますので,やりたいことに応じたスペック等の提案も可能です.
お気軽にご相談ください
点群ラボでは、大規模点群処理技術を活用した業務支援システムを提供します。
ご相談や導入支援について、お気軽にお問い合わせください。
増田 宏
Hiroshi Masuda
代表取締役
- 電気通信大学教授.
- 専門は3次元形状処理. 研究歴 40年以上. IBM 東京基礎研究所在籍時に,今日の3Dソリッドモデルの基礎となる位相操作理論を提唱.世界初の複体ベースの形状処理システムを開発.
- 2005年に,東大・増田研で点群処理の研究を開始し,多数の点群処理手法を開発.
- 2010年に,金井教授(北大)と共同で,精密工学会にサイバーフィールド構築技術 研究分科会を設立.
- 2012年に, 精密工学会・大規模環境の3次元計測と認識・モデル化技術専門委員会を設立.委員長を10年間(2013-2022)務める.
石川 貴一朗
Kiichiro Ishikawa
テクニカルディレクター
- 日本工業大学准教授.
- 専門は移動測量、自律移動システム.早稲田大学在籍時に,国内初となる実用的な MMS を開発.
- 水陸両用車や建設機械など 多数の自律移動システム の開発実績.
- つくばチャレンジの常連研究室.独自開発の自律移動ロボットで参加している.
- 点群処理分野の若手研究者として, NHK WORLD-JAPAN や, NHK サイエンスゼロに出演.
- 大規模環境の3次元計測と認識・モデル化技術専門委員会・幹事.
中村 将基
Masaki Nakamura
取締役
- 実務で点群の可視化システムの設計と実装を担当.点群処理にも精通した技術者.
- 点群ラボの IT システム等を担当.
- 大規模環境の3次元計測と認識・モデル化技術専門委員会・会員
玉澤 美紀
Miki Tamazawa
取締役
- 大規模環境の3次元計測と認識・モデル化技術専門委員会の事務局,経理を担当.
- これまでに 50件を超える多数の研究会やシンポジウムの事務局を担当する.
- 点群ラボの経理や総務などの業務を担当.
- 電気通信大学勤務.
森部 義規
Yoshinori Moribe
技術顧問
- 3次元計測の業務歴が20年以上で,3次元測量業界に精通し,現場をよく知る専門家.
- 点群ラボでは,業務企画などを担当.
- 複数の委員会で専門的知見を提供している.
- – 幹事: 大規模環境の3次元計測と認識・モデル化技術専門委員会
- – 企画委員: SPARJ 3次元計測フォーラム
- – 会員: ATOM 将来技術研究会
- 産機エンジニアリング勤務
株式会社点群ラボ
©2025 株式会社点群ラボ TENGUN LAB